
実施中の研究課題
音波を用いた屋内自己位置推定
無指向性スピーカーと無指向性マイクロフォンのみを用いて、屋内移動ロボットの位置推定を実現します。本来は信号の品質を劣化させるマルチパスやドップラー効果を情報として積極的に活用することにより少ないセンサー構成でもcm級に達する高い精度の自己位置推定を実現します。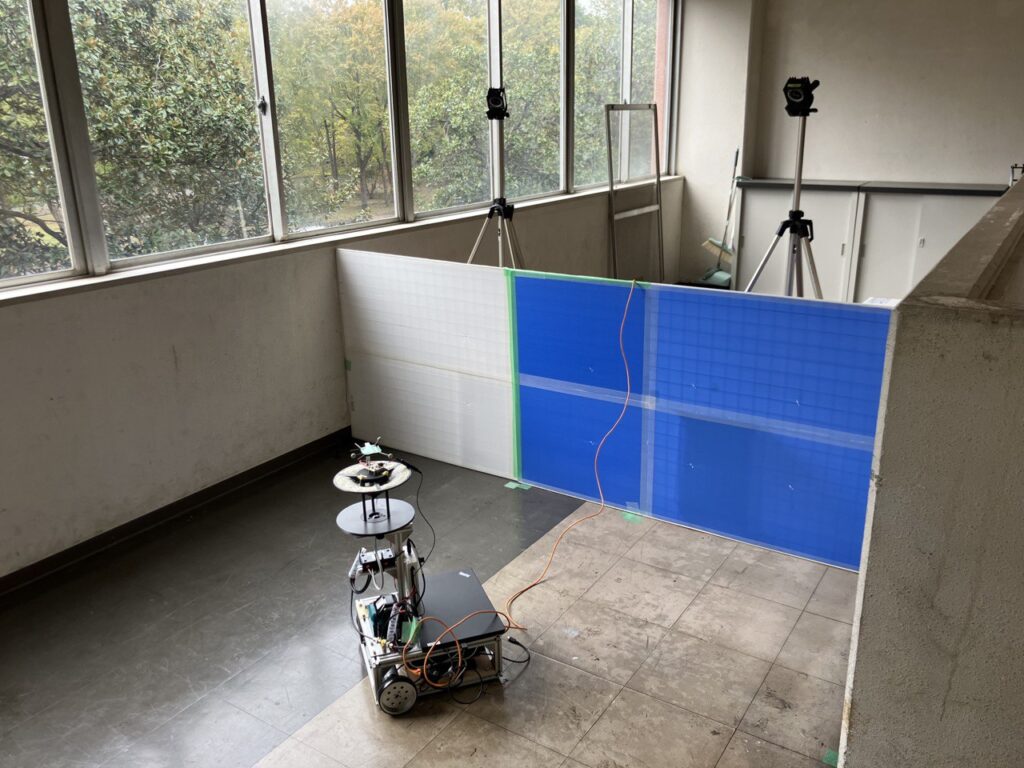
代表的な研究成果
- Atsushi Tsuchiya, Naoto Wakatsuki, Tadashi Ebihara, Keiichi Zempo, and Koichi Mizutani, “Self-localization method using a single acoustic ranging sensor based on impulse response and Doppler effect,” in IEEE Journal of Indoor and Seamless Positioning and Navigation, vol. 2, pp. 193-204, 2024.
- Atsushi Tsuchiya, Naoto Wakatsuki, Tadashi Ebihara, Keiichi Zempo, and Koichi Mizutani, “Indoor self-localization using multipath arrival time measured by a single acoustic ranging sensor,” Japanese Journal of Applied Physics, 61, SG1037, pp. 1-8, 2022.
水中音響測位
効率的かつ精密な水中建設、検査、探査のニーズを背景に,遠隔操作型および自律型水中移動体の開発が進展しています。これらの移動体の有効な運用に不可欠となる位置と姿勢、速度の正確な推定手法について研究しています。特に音響信号に生じるドップラー効果を積極的に活用することで高精度な位置推定を実現します。
代表的な研究成果
- Atsushi Tsuchiya, Tadashi Ebihara, Naoto Wakatsuki, and Tohru Yoshihara, “Velocity estimation of an underwater vehicle using Doppler shift of positioning signals,” 2025 IEEE Underwater Technology (UT), 6 pages, Taipei, Mar. 2025.
浅海域における音波伝搬の解明
高精度な水中音響測位を実現させるためには水中内における音波の伝搬を理解することが必要不可欠です。海洋環境では時間変動と共に潮位、塩分濃度、水温がダイナミックに変動し、それらの空間的な分布が音波の伝搬経路を大きく変化させます。本研究では浅海域の音波伝搬予測に適したシミュレータを開発し、その応用を検討します。
代表的な研究成果
アナログ回路によるマイクロフォンの低雑音化に関する研究
一般的なマイク回路はコンデンサー内部に蓄積する電荷量を調整するために数十MΩ以上のバイアス抵抗を取り付ける必要があります。この抵抗はセルフノイズの主要因とされる熱雑音を発生させるため、この雑音がマイクロフォン性能のボトルネックとされていました。本研究は抵抗の代わりに光センサーを用いたフィードバック機構を設計することにより、雑音の発生量を大幅に低減させたアンプ回路を実現します。